Surgical Joystic
MemicMed
Robotic Assisted Surgery Joystick.
Designing a joystick is one of the biggest challenges when it comes to Human-Computer Interaction (HCI) design. Especially when performing minimally-invasive surgery by controlling an articulated robotic arm inside the patient's body.
Design's main challenge was designing one system to suit different hand sizes and mimicking the end function of the robotic arm: Gripping a live tissue while using an electromechanical interface.
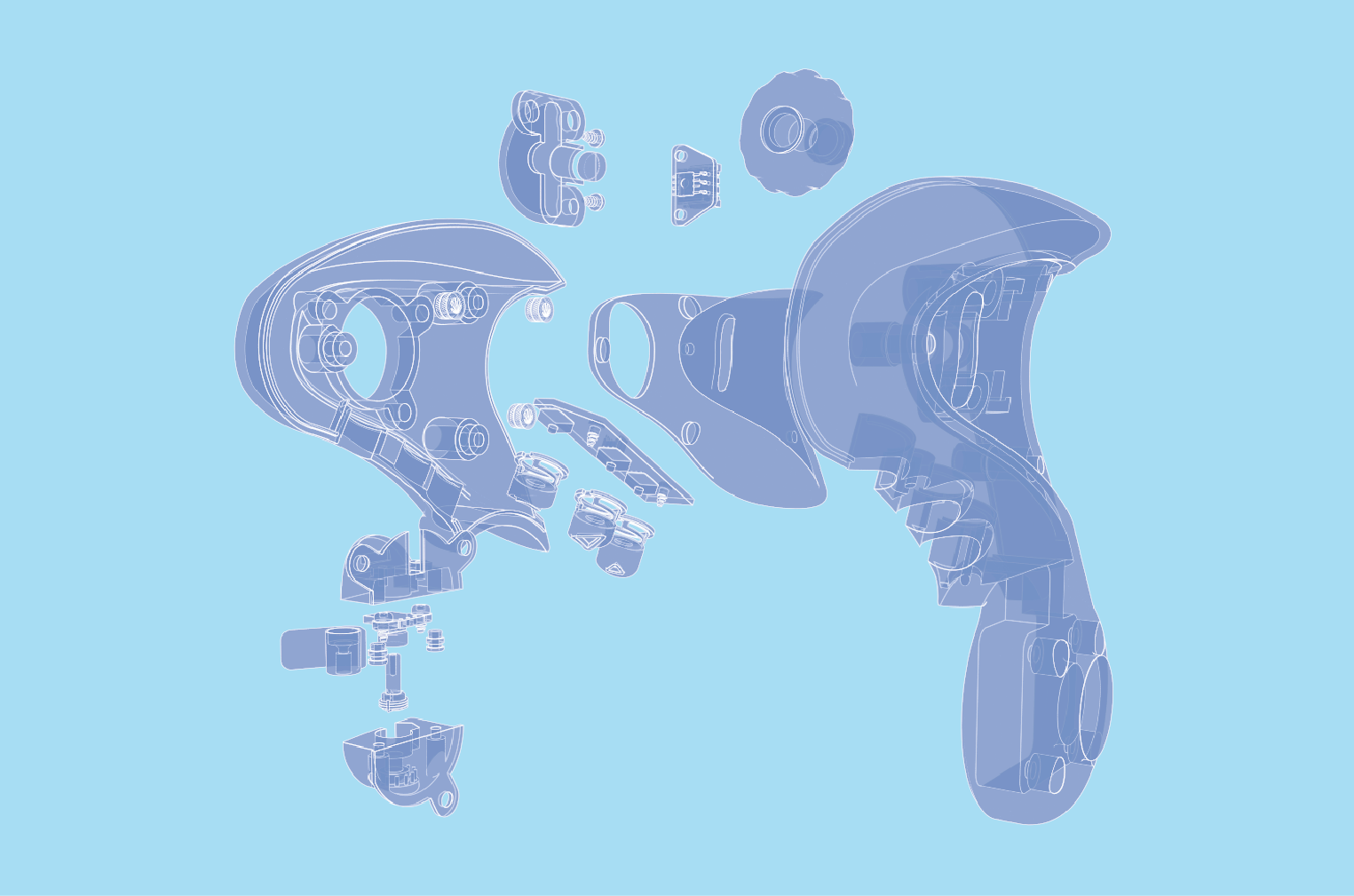
We addressed the positions of the different buttons by evaluating functionalities, duration of use, frequency of use, and an affordance for each one. Combing the different features with the surgeons' hand posture by an ergonomic study. Our approach to the diversity of hands and finger size realized in soft gripping and adjustable handles, providing personalization of joystick.
Each one of the factors and assumptions was first examined by using CAD models and embedding hardware components for volume and size verifications. In parallel, we've 3-D printed the different designs for physical and ergonomic testing of each concept time and again until optimal configuration was obtained. The final result is now on field tests by surgeons in hospitals both in Israel and Belgium.